4WD robot
|
Efter att ha köpt två motormoduler
och tillhörande hjul från
Hobbytronik
samt en del meckande med plexiglas är detta resultatet:  Jag har inte bestämt mig om det skall bli en linjeföljare, en "vanlig" robotbil eller både och. Det beror lite på vad jag har för transistorer hemma, om jag kan bygga två h-bryggor eller ej. Jag måste kolla upp vad motorerna drar innan jag kan ta ställning till detta. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Nu har det skett en hel del, lite programmering och en hel del lödande har resulterat i detta: 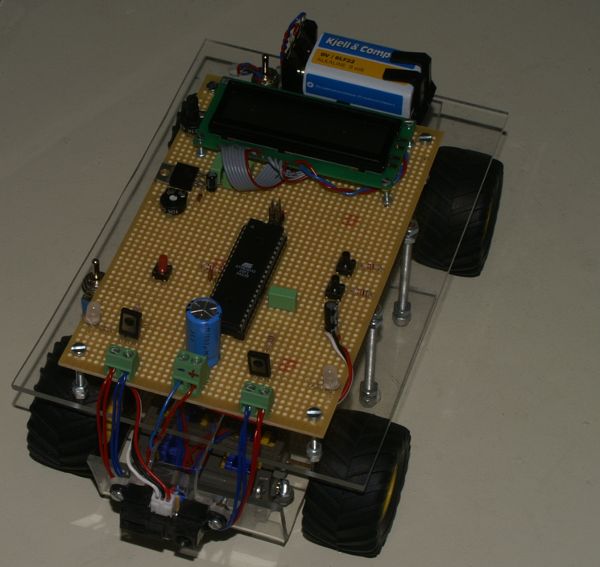
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Som ni ser har det tillkommit en hel del komponenter. För tillfället kan den bara gå framåt men tanken är att det skall bli ett par H-bryggor. I fronten sitter en avståndssensor från Sharp som jag pillat lite med. Den verkar trevlig och lättanvänd. Mellan Vcc och GND skall det sitta en kondensator på minst 10μF, jag valde 22μF/50V eftersom den var närmaste större värde på elektrolyter jag hade. Transistorerna är ett par BD681 som är av typen darlington NPN. Sedan kan ni skymta ett par vippströmställare som är för att slå på och av spänningen till mikrokontroller och resterande elektronik, samt en till motorernas batterier som ligger mellan motorerna. Batterierna är fyra stycken 1,5V i storlek AA. Några tryckknappar syns också, den röda är reset för ATMega32:an och de andra har ingen funktion än. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Så en liten närbild på avståndssensorn: 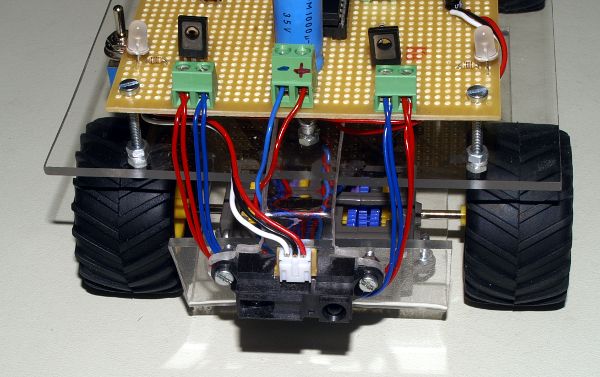
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Efter en del läsande i datablad har jag identifierat och kopplat in avståndssensorn som ni ser på ovanstående bild. För att få en uppfattning om hur den betedde sig mätte jag upp avstånd mellan 10 cm och 120 cm. Eftersom databladet säger att den fungerar mellan 10 cm och 80 cm så var det en chansning med 120 cm. men det skulle visa sig fungera alldeles utmärkt för alla material jag testade utom en svart plast. De material jag testade var vitt papper avsett för laserskrivare (märke Xerox). Baksidan på en förvaringsask för skruvmejslar, en brun ask för en penna av märket Cross samt en svart almanacka Interplano II. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
gick det bra med avstånd upp till 120 cm. En bild säger ju mer än tusen ord så ta gärna en titt på diagrammet nedan: 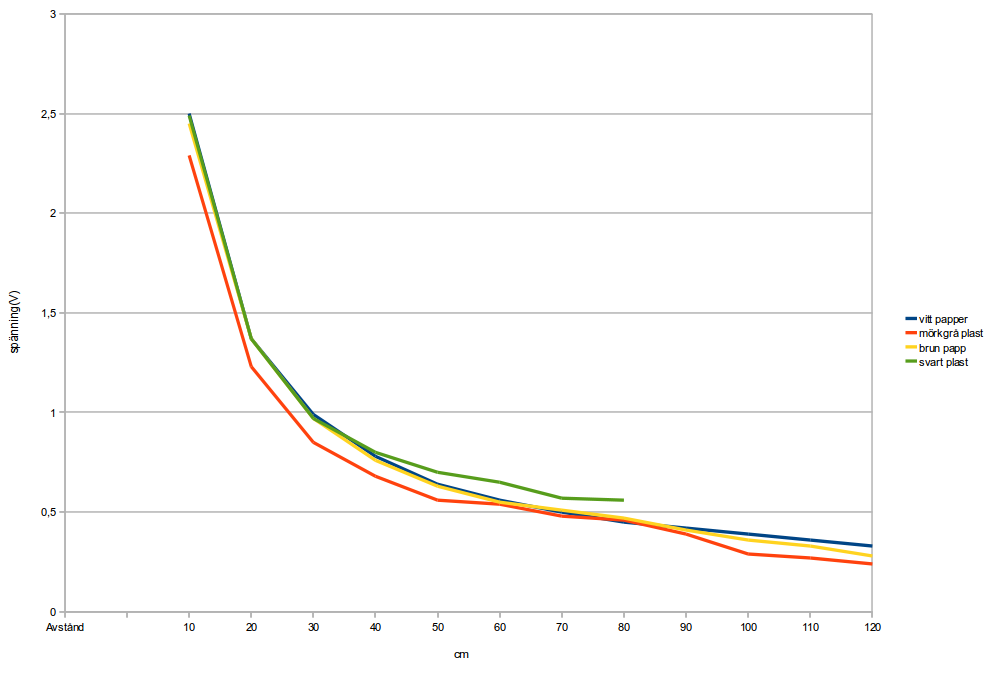
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Nästa steg är att dra igång ADC:n på min Mega32:a, men det kommer senare. Efter det skall jag knåpa ihop ett gäng reflexdetektorer för att få till en linjeföljare. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Nu har jag fått igång ADC så nu kan min lilla robot väja för hinder. Se det lilla videoklippet nedan: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Nästa steg är att knåpa ihop en liten historia för att roboten skall kunna följa en linje. Så efter lite testande lödde jag ihop följande "skapelse": 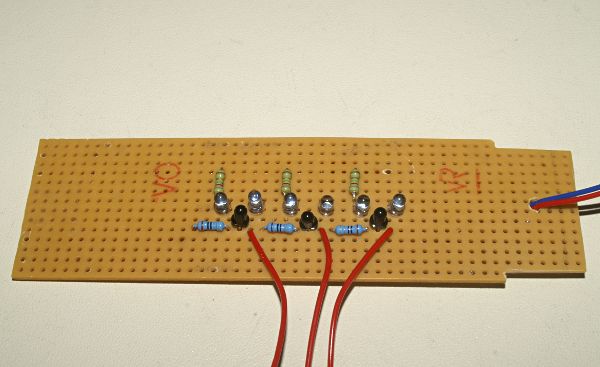 Nästa steg är att kapa överblivet experimentkort och få till ett fäste så att jag kan montera den på roboten ganska nära marken (golvet). |